Quadrotor Drone Development and Testing
Drone Design
I built several quadrotors using an off-the-shelf frame and custom-designed circuit boards for the control system. The onboard controller consisted of four units, which were interconnected via a CAN bus:
- RCS unit: Handles data link
- FCC unit: Manages the main control loop
- BSS unit: Collects sensor data
- PMU unit: Manages battery power


Testing
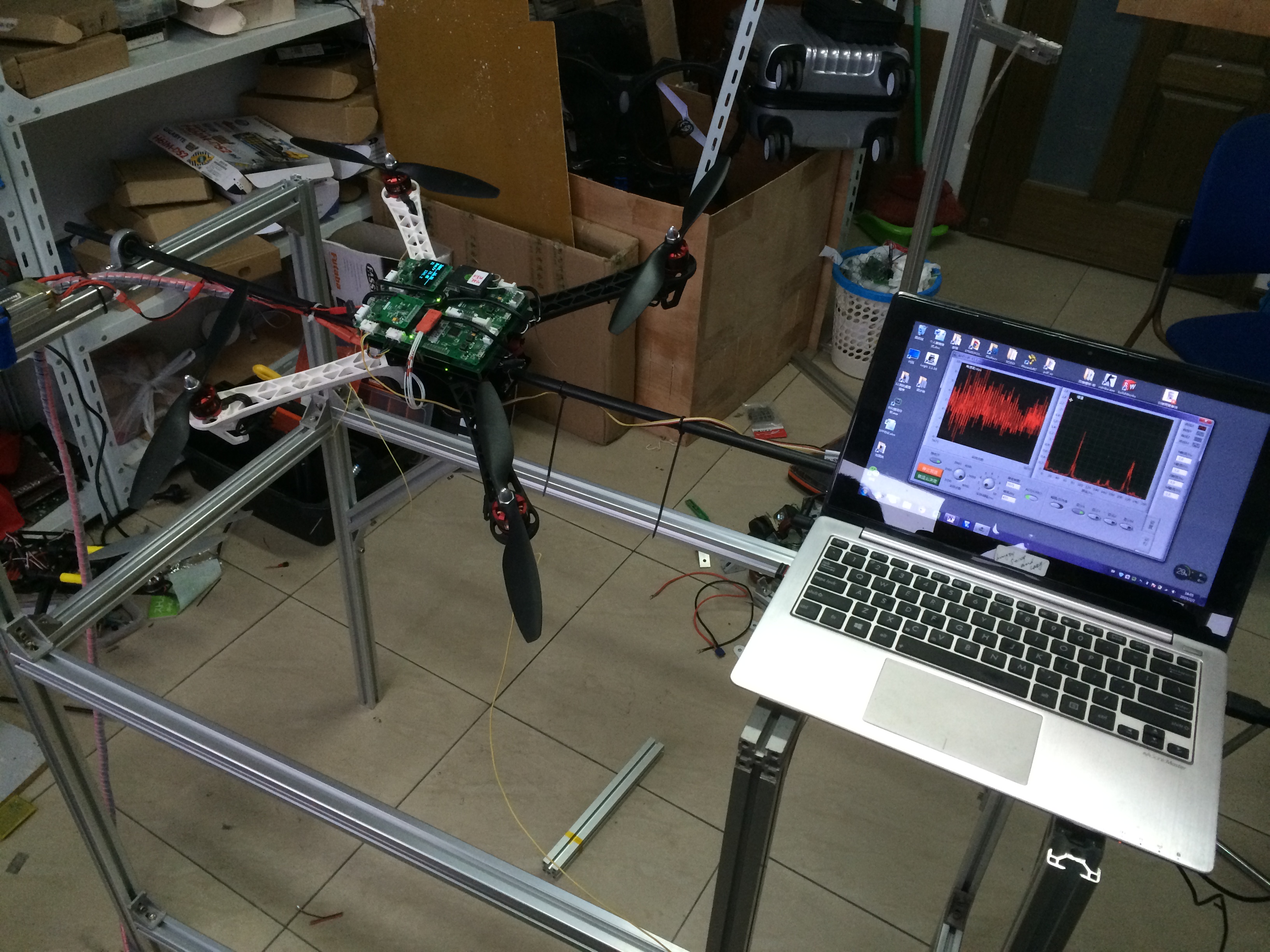
Testing on the rig
Testing with homemade monitoring software
Testing flghts test-flight1-15sec.mp4
Test flight (short)
test-flight1-15sec.mp4
Test flight (long)
Review
This project served as a hardware foundation for my thesis. However, integrating it with the vision-based landing system proved too challenging, so I opted to simulate that aspect in my thesis project instead.